


NEMA8 20mm hybrid stepper motor na 1.8 digri na anggulo ng hakbang na D shaft
Paglalarawan
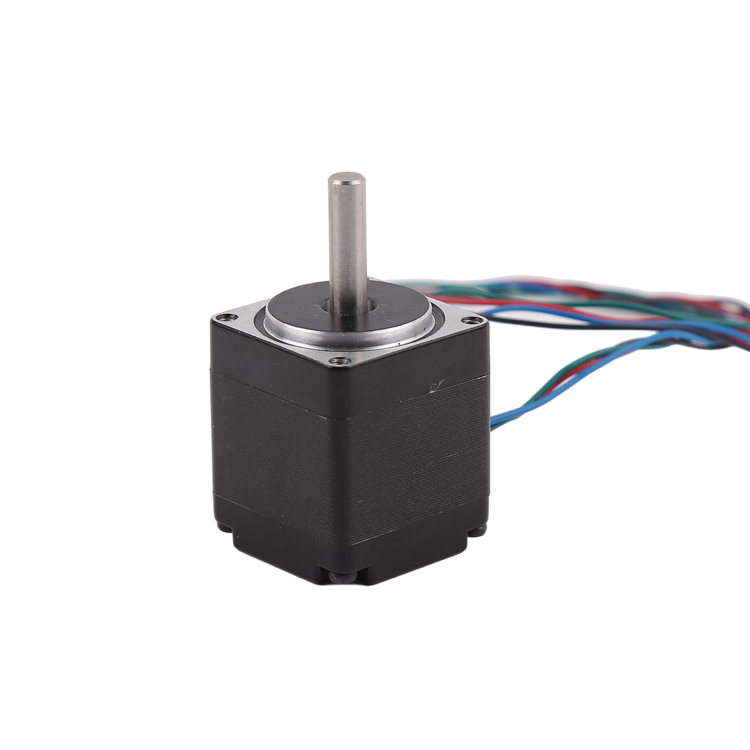
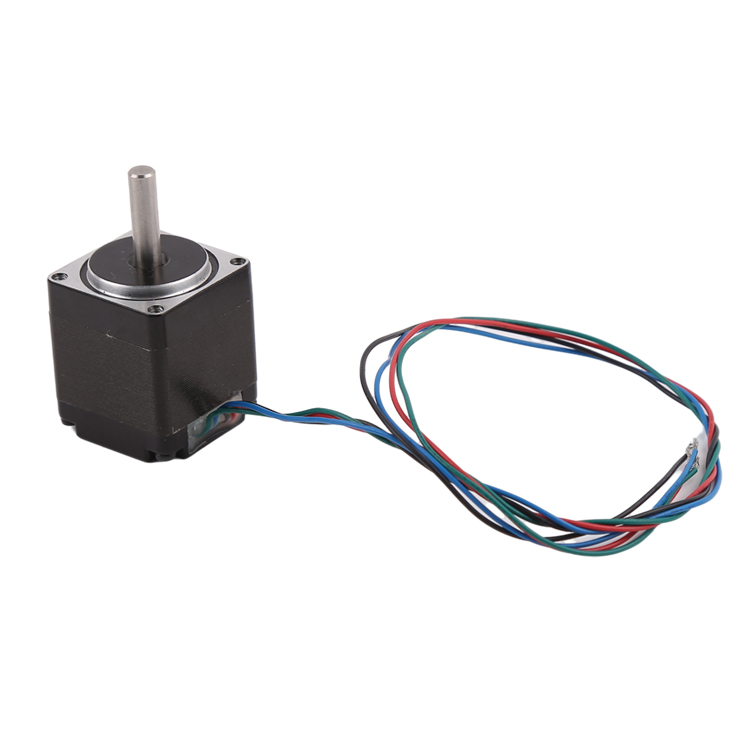
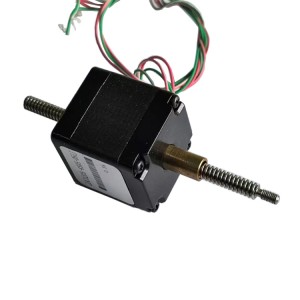
Ang NEMA8 motor na ito ay isang 20 mm na laki ng hybrid stepper motor.
Ang motor na ito ay isang high-precision, maliit na hybrid stepping motor na may magandang anyo at mahusay na pagganap.
Ang anggulo ng hakbang ay 1.8°, na nangangahulugang nangangailangan ng 200 hakbang upang makagawa ng isang rebolusyon.
Ang haba ng motor ay 30mm, 38mm at 42mm, mas mahaba ang motor, mas mataas ang metalikang kuwintas.
Mas malaki ang torque ng 42mm habang mas maliit naman ang 30mm.
Maaaring piliin ng mga customer ang haba ayon sa kanilang mga kinakailangan sa metalikang kuwintas at espasyo.
Nag-aalok din kami ng serbisyo sa pagpapasadya.
Pinipili ng mga customer ang mga parameter sa ibaba ayon sa kanilang mga pangangailangan. Huwag mag-atubiling makipag-ugnayan sa amin para sa anumang mga katanungan tungkol sa motor, at magbibigay kami ng mas propesyonal na suporta.
Mga Parameter
| Anggulo ng Hakbang (°) | Haba ng motor (milimetro) | Paghawak ng metalikang kuwintas (g*cm) | Kasalukuyan /yugto (A/yugto) |
Paglaban (Ω/yugto) | Induktans (mH/yugto) | Bilang ng mga lead | Inersiya ng pag-ikot (g*cm)2) | Timbang (KG) |
| 1.8 | 30 | 180 | 0.6 | 6.5 | 1.7 | 4 | 1.6 | 0.06 |
| 1.8 | 38 | 300 | 0.6 | 10 | 2.5 | 4 | 2.2 | 0.08 |
| 1.8 | 42 | 300 | 0.8 | 5.4 | 1.5 | 4 | 2.9 | 0.06 |
Ang mga parametro sa itaas ay mga karaniwang produkto para sa sanggunian, ang motor ay maaaring ipasadya batay sa kinakailangan ng customer.
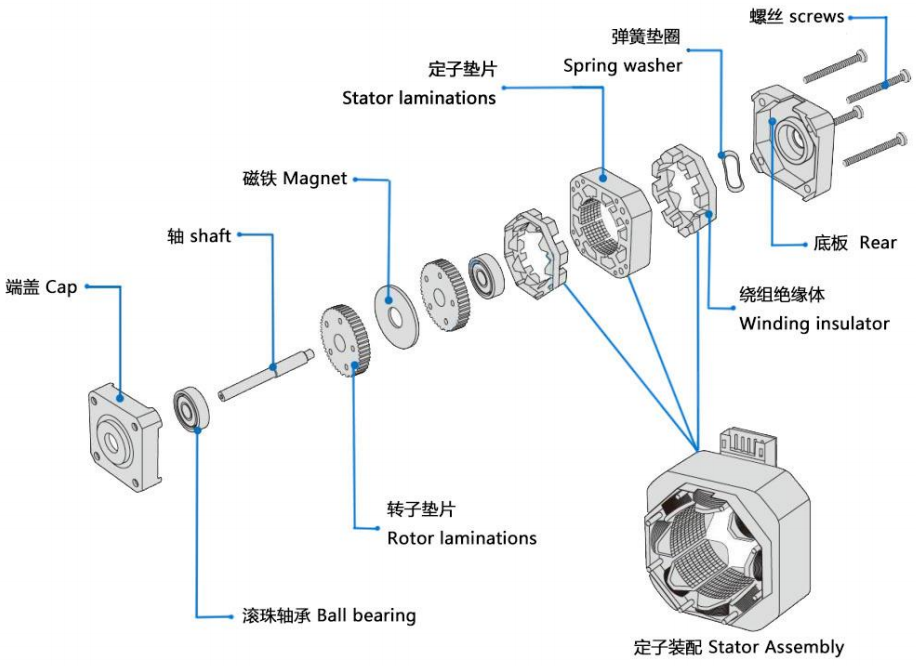
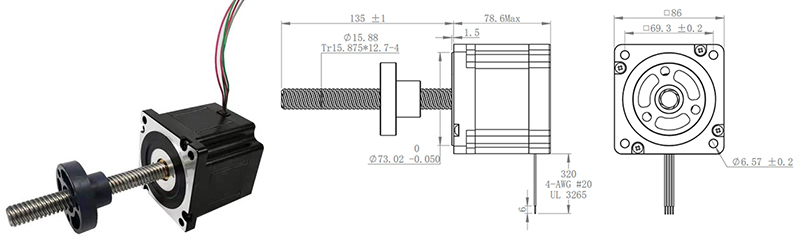
Pagguhit ng disenyo
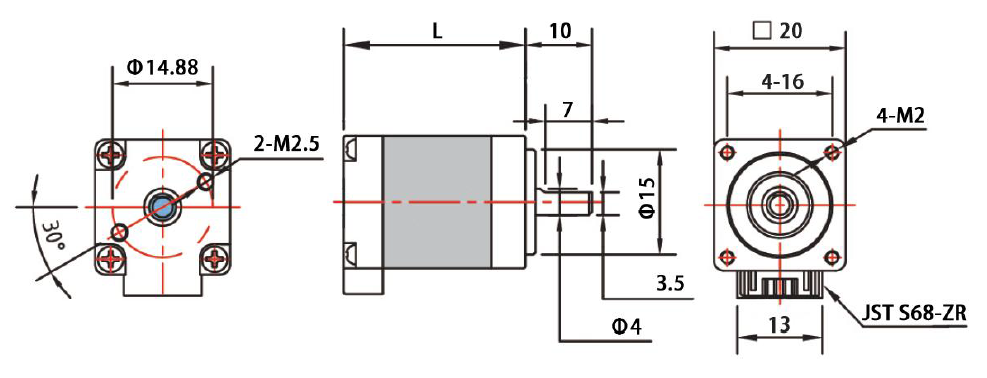
Pangunahing istruktura ng mga NEMA stepper motor
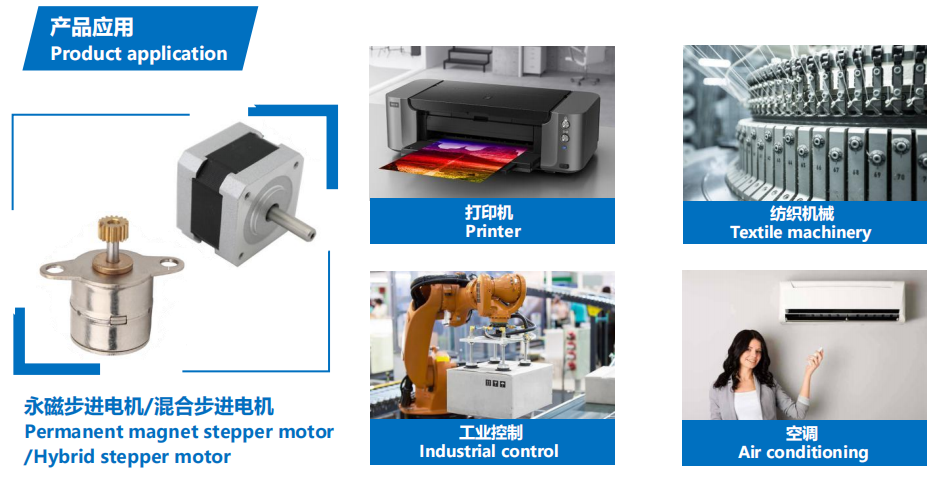
Aplikasyon ng Hybrid stepper motor
Dahil sa mataas na resolution ng mga hybrid stepper motor (200 o 400 hakbang kada rebolusyon), malawakang ginagamit ang mga ito para sa mga aplikasyon na nangangailangan ng mataas na katumpakan, tulad ng:
3D printing
Kontrol sa industriya (CNC, awtomatikong makinang panggiling, makinarya sa tela)
Mga peripheral ng computer
Makinang pang-iimpake
At iba pang mga awtomatikong sistema na nangangailangan ng mataas na katumpakan na kontrol.
Mga Tala sa Aplikasyon tungkol sa mga hybrid stepper motor
Dapat sundin ng mga customer ang prinsipyo ng "pagpili muna ng mga stepper motor, pagkatapos ay piliin ang driver batay sa umiiral na stepper motor"
Pinakamainam na huwag gamitin ang full-step driving mode para magmaneho ng hybrid stepping motor, at mas malaki ang vibration sa ilalim ng full-step driving.
Mas angkop ang hybrid stepper motor para sa mga pagkakataong mababa ang bilis. Iminumungkahi namin na ang bilis ay hindi hihigit sa 1000 rpm (6666PPS sa 0.9 degrees), mas mabuti sa pagitan ng 1000-3000PPS (0.9 degrees), at maaari itong ikabit gamit ang gearbox upang mapababa ang bilis nito. Ang motor ay may mataas na kahusayan sa pagtatrabaho at mababang ingay sa angkop na frequency.
Dahil sa mga kadahilanang pangkasaysayan, tanging ang motor na may nominal na 12V na boltahe ang gumagamit ng 12V. Ang ibang rated na boltahe sa disenyo ay hindi eksakto ang pinakaangkop na boltahe sa pagmamaneho para sa motor. Dapat pumili ang mga customer ng angkop na boltahe sa pagmamaneho at angkop na driver batay sa kanilang sariling pangangailangan.
Kapag ang motor ay ginagamit nang may mataas na bilis o malaking karga, kadalasan ay hindi ito direktang nagsisimula sa bilis ng pagpapatakbo. Iminumungkahi namin na unti-unting dagdagan ang frequency at bilis. Sa dalawang dahilan: Una, hindi nawawalan ng hakbang ang motor, at pangalawa, maaari nitong bawasan ang ingay at mapabuti ang katumpakan ng pagpoposisyon.
Hindi dapat gumana ang motor sa lugar na may vibration (mas mababa sa 600 PPS). Kung kailangan itong gamitin sa mabagal na bilis, maaaring mabawasan ang problema sa vibration sa pamamagitan ng pagpapalit ng boltahe, kuryente, o pagdaragdag ng kaunting damping.
Kapag ang motor ay gumagana sa ibaba ng 600PPS (0.9 degrees), dapat itong paandarin ng maliit na kuryente, malaking inductance, at mababang boltahe.
Para sa mga karga na may malaking moment of inertia, dapat pumili ng malaking motor.
Kapag kinakailangan ang mas mataas na katumpakan, maaari itong malutas sa pamamagitan ng pagdaragdag ng gearbox, pagpapabilis ng motor, o paggamit ng subdivision driving. Maaari ring gamitin ang 5-phase motor (unipolar motor), ngunit ang presyo ng buong sistema ay medyo mahal, kaya bihirang gamitin.
Laki ng stepper motor:
Kasalukuyan kaming mayroong 20mm (NEMA8), 28mm (NEMA11), 35mm (NEMA14), 42mm (NEMA17), 57mm (NEMA23), 86mm (NEMA34) hybrid stepper motors. Iminumungkahi naming tukuyin muna ang laki ng motor, pagkatapos ay kumpirmahin ang iba pang parameter, kapag pumipili ka ng hybrid stepper motor.
Serbisyo sa pagpapasadya
Maaaring iakma ang disenyo ng motor batay sa pangangailangan ng customer kabilang ang:
Diametro ng Motor: mayroon kaming motor na may diyametrong 6mm, 8mm, 10mm, 15mm at 20 mm
Resistance ng coil/rated voltage: ang resistensya ng coil ay naaayos, at kapag mas mataas ang resistance, mas mataas din ang rated voltage ng motor.
Disenyo ng bracket/haba ng turnilyo na may tingga: kung nais ng customer na mas mahaba/maikli ang bracket, na may espesyal na disenyo tulad ng mga butas para sa pagkakabit, maaari itong isaayos.
PCB + mga kable + konektor: Ang disenyo, haba ng kable at pitch ng konektor ng PCB ay pawang naaayos, maaari itong palitan sa FPC kung kinakailangan ng mga customer.
Oras ng Pangunguna
Kung mayroon kaming mga sample sa stock, maaari kaming magpadala ng mga sample sa loob ng 3 araw.
Kung wala kaming mga sample sa stock, kailangan naming gawin ang mga ito, ang oras ng produksyon ay humigit-kumulang 20 araw ng kalendaryo.
Para sa mass production, ang lead time ay depende sa dami ng order.
Paraan ng pagbabayad at mga tuntunin sa pagbabayad
Para sa mga halimbawa, sa pangkalahatan ay tinatanggap namin ang Paypal o alibaba.
Para sa mass production, tinatanggap namin ang T/T payment.
Para sa mga sample, kinokolekta namin ang buong bayad bago ang produksyon.
Para sa mass production, maaari naming tanggapin ang 50% na pre-payment bago ang produksyon, at kolektahin ang natitirang 50% na bayad bago ang pagpapadala.
Pagkatapos naming makipagtulungan sa order nang higit sa 6 na beses, maaari kaming makipag-ayos sa iba pang mga tuntunin sa pagbabayad tulad ng A/S (pagkatapos ng paningin)
Mga Madalas Itanong
1. Gaano katagal ang pangkalahatang oras ng paghahatid para sa mga sample? Gaano katagal ang oras ng paghahatid para sa mga back-end na malalaking order?
Ang oras ng lead ng sample order ay humigit-kumulang 15 araw, ang oras ng lead ng mass quantity order ay 25-30 araw.
2. Tumatanggap ba kayo ng mga pasadyang serbisyo?
Tumatanggap kami ng mga produktong ipasadya. Kabilang ang parameter ng motor, uri ng lead wire, out shaft atbp.
3. Posible bang magdagdag ng encoder sa motor na ito?
Para sa ganitong uri ng motor, maaari tayong magdagdag ng encoder sa takip ng motor para sa pagkasira.
Mga Madalas Itanong
1. Paano bawasan ang init ng stepper motor:
Ang pagbabawas ng init ay ang pagbabawas ng pagkawala ng tanso at bakal. Ang pagbabawas ng pagkawala ng tanso sa dalawang direksyon, pagbabawas ng resistensya at kuryente, na nangangailangan ng pagpili ng maliit na resistensya at rated na kuryente hangga't maaari kapag ang motor, ang two-phase motor, ay maaaring gumamit ng motor nang serye nang walang parallel na motor. Ngunit madalas itong sumasalungat sa mga kinakailangan ng metalikang kuwintas at mataas na bilis. Para sa napiling motor, ang awtomatikong half-current control function at offline function ng drive ay dapat na ganap na magamit, ang una ay awtomatikong binabawasan ang kuryente kapag ang motor ay nakatigil, at ang huli ay pinuputol lamang ang kuryente. Bilang karagdagan, ang subdivision drive, dahil ang current waveform ay malapit sa sinusoidal, mas kaunting harmonics, ang pag-init ng motor ay magiging mas kaunti rin. May ilang mga paraan upang mabawasan ang pagkawala ng bakal, at ang antas ng boltahe ay nauugnay dito. Bagama't ang isang motor na minamaneho ng mataas na boltahe ay magdudulot ng pagtaas sa mga katangian ng high-speed, nagdudulot din ito ng pagtaas sa pagbuo ng init. Kaya dapat nating piliin ang tamang antas ng boltahe ng drive, isinasaalang-alang ang mataas na bilis, kinis at init, ingay at iba pang mga tagapagpahiwatig.
Ipadala ang iyong mensahe sa amin:
Mga kategorya ng produkto
-
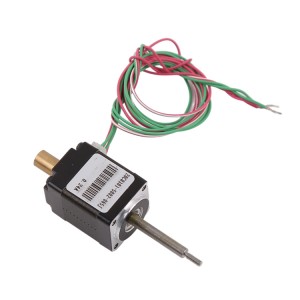
20mm NEMA8 linear hybrid stepper motor na may run...
-

28mm na laki ng NEMA11 hybrid stepper motor na 1.8 digri...
-
NEMA11 28mm linear hybrid stepper motor na walang takip...
-

Planetary gearbox stepper motor 35mm (NEMA 14) ...
-

NEMA 6 mataas na katumpakan na dalawang-phase 4-wire 14mm na hyb ...
-

Mataas na Katumpakan 42mm stepper motor NEMA 17 hybrid ...