Micro geared na motorbinubuo ng motor at gearbox, ang motor ang pinagmumulan ng kuryente, ang bilis ng motor ay napakataas, ang torque ay napakaliit, ang motor rotational motion ay ipinapadala sa gearbox sa pamamagitan ng mga ngipin ng motor (kabilang ang worm) na naka-mount sa motor shaft, kaya ang motor shaft ay isa sa mga napakahalagang bahagi sa micro geared motor.
I. Materyal ng motor shaft
Ang pagpili ng shaft material ay dapat isaalang-alang ang torque size, machinability, corrosion resistance, at kung ito ay magnetically conductive ayon sa mga kinakailangan ng motor, ang materyal ay maaaring mapili mula sa mataas na kalidad na carbon steel, stainless steel, alloy steel, carburized steel, atbp. Ang mga karaniwang ginagamit na materyales sa motor shaft ay ang mga sumusunod na uri.
1. American Standard 1141 & 1144 steel, ang pinakamalapit na domestic material ay No. 45 steel, ang pinakamalawak na ginagamit na materyal sa industriya sa kasalukuyan. Ang pangunahing kawalan ay madali itong kalawangin, kaya kapag ginamit, kailangang maglagay ng karagdagang rust-proof na langis upang maibsan ang problema ng kalawang.
2.American Standard 416 stainless steel, ang pinakamalapit na domestic material ay Y1Cr13. hindi madaling iproseso, hindi angkop para sa pagproseso na may kumplikadong mga tampok, tulad ng ulo ng baras na may mga thread, ang presyo ay mas mahal kaysa sa 45 bakal, mas mura kaysa sa 303, mas malawak na ginagamit.
3.American Standard 420 stainless steel, ang pinakamalapit na domestic material ay 2Cr13. hindi madaling iproseso, hindi angkop para sa pagproseso na may kumplikadong mga tampok, tulad ng ulo ng baras na may sinulid, mas mahal kaysa sa 45 bakal, mas mura kaysa sa 416/303, mas malawak na ginagamit.
4. American Standard 431 hindi kinakalawang na asero, ang materyal na ito ay hindi karaniwang ginagamit, pangunahin sa pakikipag-ugnay sa mga okasyon ng pagkain. Maaaring makipag-ugnayan sa pagkain.
5. American Standard 303 hindi kinakalawang na asero, mas mahal, nailalarawan sa pamamagitan ng malambot na materyal, madaling iproseso sa kumplikadong mga hugis.
II. Ang hugis ng motor shaft
Ang mga ngipin ng motor sa micro geared na motor at ang mga unang antas ng ngipin sa gearbox mesh upang magpadala ng rotary motion, na hindi maaaring hindi makagawa ng torque, kaya ang fit tightness ng mga ngipin ng motor at ang motor shaft ay napakahalaga. Isaalang-alang ang mga ngipin ng motor at ang motor shaft fit, hindi namin maaaring makuha sa paligid ng hugis ng motor shaft.
Ang mga hugis ng motor shaft ay
A. Banayad na baras, angkop para sa maliit na load at maliit na metalikang kuwintas.
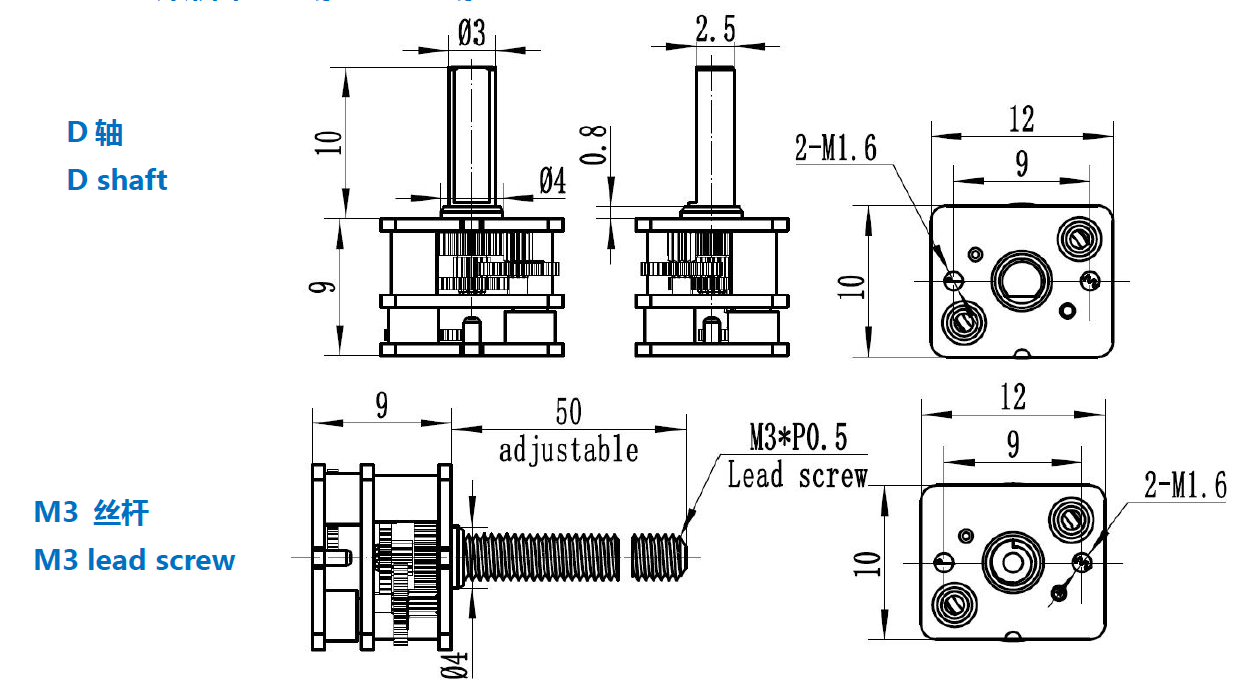
B. Flat shaft o D-shape shaft, angkop para sa medium load.
C. Knurled shaft, angkop para sa medium load.
D.Rotating shaft na may keyway, na angkop para sa mabigat na pagkarga at mataas na torque.
E. Ang output dulo ng motor shaft ay worm, ang ganitong uri ng motor shaft ay espesyal, kadalasang ginagamit para sa turbo worm drive.
III. Mga kinakailangan sa proseso ng motor shaft
Mga motor na may micro gearmay mga kinakailangan sa buhay, at ang mga kinakailangan sa proseso ng motor shaft ay nakakaapekto rin sa buhay ng micro geared motor.
Ang teknolohiya ng pagproseso ng motor shaft ay may.
A. Ang katumpakan ng laki ng diameter ng motor shaft ay medyo mataas, maaaring makamit sa loob ng 0.002mm.
B. Upang maiwasan ang kalawang at mapabuti ang resistensya ng kaagnasan, ang ibabaw ng motor shaft ay madalas na electroplated na may nickel.
C. Ang pagkamagaspang sa ibabaw ng baras ng motor ay napakahalaga din, na direktang nakakaapekto sa katumpakan ng pagkakatugma sa mga ngipin ng motor.
IV. Pag-uuri ng speed reducer drive shaft
Ang reducer ay nahahati sa high-power reducer at low-power reducer ayon sa kapangyarihan. Ang output shaft ng iba't ibang kapangyarihan, modelo at specification reducer ay iba rin, at ang transmission shaft ng reducer ay nahahati sa output shaft at input shaft, at ang prinsipyo ng dalawang uri ng shaft ay ipinakilala sa detalye sa ibaba.
1. Output shaft
Ang output shaft ay ang baras na konektado sa reducer at mekanismo ng paghahatid, ang bilis ng output ng output shaft ay mas mabagal, ayon sa materyal na output shaft ay nahahati sa metal output shaft, plastic output shaft; ayon sa hugis ay nahahati sa nako-customize na D-shaped shaft, round shaft, double flat shaft, hexagonal shaft, pentagonal shaft, square shaft, atbp.
2. Input shaft
Ang input shaft ay ang connecting transmission shaft ng transmission motor at reducer, input speed at torque ng input shaft ay maliit, shaft diameter; Ang isang dulo ng input shaft ay maaaring dumaan sa mounting hole at i-embed sa mounting cavity, input shaft ay maaaring mag-mesh sa gear sa mounting shell, mounting slot ay binuksan sa kabilang dulo ng input shaft, pagkatapos ay ang motor shaft ng reducer motor ay naka-embed sa mounting slot, at ang flat key ay ipinasok sa pagitan ng flat key slot at motor shaft upang makamit ang Ang input shafttable at sfttable na koneksyon. Sa pamamagitan ng nabanggit na pakikipagtulungan sa pagitan ng input shaft, ang mounting base, ang mounting slot at ang flat key slot, ang geared motor ay maaaring mabilis na maikonekta sa input shaft sa pamamagitan ng motor shaft, na nagpapadali sa mabilis na pag-install ng geared motor na may mounting housing at ginagawang mas maginhawa ang paglo-load at pagbaba ng mga tauhan.
3. Ang papel at pagkakaiba ng transmission shaft ng reducer.
A. ilipat ang isang tiyak na halaga ng kapangyarihan.
B. Input bilis ng pag-ikot, output mababang bilis ng pag-ikot, upang makamit ang layunin ng pagbabawas ng bilis. Sa premise ng disregarding ang friction resistance, ang input shaft at ang output shaft transfer pantay na kapangyarihan, at kapangyarihan = metalikang kuwintas * bilis, iyon ay, kapag ang kapangyarihan ay pantay, ang metalikang kuwintas at bilis input baras bilis, kaya ang metalikang kuwintas ay maliit, lamang ng isang mas maliit na diameter ng baras; sa kabaligtaran, ang bilis ng output shaft ay mababa, kaya ang metalikang kuwintas ay malaki, dapat gumamit ng mas malaking diameter ng baras.
V. Ano ang mga dahilan para sa pag-init ng mga bearings ng miniature geared motor?
Micro geared na motorSa normal na operasyon, ang tindig ay hindi lilitaw abnormal heating, micro geared motor tindig heating malubhang karaniwang may mga sumusunod na dahilan.
1. maliit na reducer motor bearing pinsala pagkatapos ay gawin ang motor tindig overheating.
2. Ang pampadulas na grasa na may halong abnormal na mga particle o banyagang bagay sa bearing ay magpapapataas ng overheating ng bearing.
3. miniature reducer motor tindig kakulangan ng langis, kung ang motor sa estado na ito para sa isang mahabang panahon ay gumawa ng alitan nadagdagan na nagreresulta sa tindig overheating.
4. Ang kalidad ng lubricating oil ay masyadong mahirap, hindi sapat ang lagkit o masyadong mataas na lagkit, ang pagpapadulas ng pagganap ay hahantong din sa abnormal na pag-init ng tindig.
5. miniature reducer bearing at output shaft, ang dulo ng takip ay masyadong maluwag o masyadong masikip, masyadong masikip ay hahantong sa pagpapapangit ng tindig, masyadong maluwag ay hahantong sa offset ay gagawing seryoso ang bearing heating.
6. hindi tamang pag-install ng mga bearings upang ang dalawang shafts ay hindi sa isang tuwid na linya o tindig panlabas na singsing kawalan ng timbang, pagkatapos ay ang tindig ay hindi magiging sensitibo, load tumatakbo aggravated at init.
VI. Ano ang mga pangunahing dahilan para sa axial runout ng miniature motor?
1. Ang unang kaso ay ang kamag-anak na paggalaw ng baras at rotor ng micro motor, ang rotor core at baras na may kung para sa ilang kadahilanan ang core hole at micro motor shaft core position clearance, na humahantong sa micro motor rotor core at shaft sa pagitan ng mga pagbabago ng posisyon ng axial at radial na kamag-anak, mayroong isang tampering shaft phenomenon, hindi lamang iyon, dahil sa mataas na posibilidad ng paggalaw ng motor na may posibilidad na magkaroon ng isang maliit na dulo ng motor at may posibilidad na magkaroon ng isang mini-motor na kilusan. rotor end friction deformation, o ripple sa stator winding.
2. Ang pangalawang kaso ay ang micro motor axial adjustment pad damage o leakage, kami sa micro motor na disenyo at proseso ng pag-unlad, ang materyal na thermal expansion na mga kadahilanan ay mga pangunahing pagsasaalang-alang, kaya sa axial ay mag-iiwan ng isang tiyak na puwang, ngunit ito ay direktang hahantong sa axial displacement tampering axis, kaya ang paggamit ng paraan ng paglo-load ng pad upang malutas, kung ang pad ay magiging fault ng lead, kung ang pad ay masira ang kalidad ng leakage. pagkabigo ng axial brake, tampering shaft.
3. Ang pangatlong kaso ay ang micro motor stator-rotor magnetic centerline automation alignment adjustment na nagreresulta sa tampering, ang ideal na estado ng micro motor ay ang stator at rotor magnetic centerline na ganap na magkakapatong, ngunit sa pagsasanay ang micro motor stator-rotor ay mas mahirap na makamit ang kumpletong overlap alignment, kaya ang micro motor sa proseso ng operasyon ay mawawala sa sitwasyong ito: -----offset-offset-alignment-offset-automatic alignment proseso ng pagsasaayos, kaya lilitaw ang paulit-ulit na proseso ng pagsasaayos ng axial runout.
4. kamag-anak sa micro-motor na may sariling propeller sa operasyon, ang proseso ng bentilasyon ay magbubunga ng kaukulang axial force sa micro-motor, kung ang epekto ng balanse ng propeller ay hindi maganda, na hahantong din sa axial movement ng micro-motor.
Micro motor axial runout ay makagawa ng epekto?
Sa madaling salita, kung ang pinaliit na motor axial runout ay gagawing abnormal na panginginig ng boses ang pinaliit na motor, ingay, nakakalat na tindig, nasusunog na windings, bawasan ang buhay ng serbisyo ng sitwasyon. Maaari kaming magdagdag ng waveform cushion upang ayusin ang cushion sa panlabas na gilid ng miniature motor bearing at end cap nail upang malutas ang problema ng axial movement ng miniature motor.
VII. Paano i-configure ang mga bearings ng planetary reduction gearbox?
Ginamit ang planetary reducer configuration motor sa iba't ibang larangan tulad ng smart home, kaya paano naka-configure ang bearing ng micro reducer?
Sa pangkalahatan, ang mga micro planetary gearbox ay gumagamit ng helical gear na may partikular na axial force, at kahit na double helical gears at spur gears ang ginagamit, ang axial na direksyon ay dapat na nakaposisyon. Ang magnitude at direksyon ng meshing force ng mga gears ay maaaring matukoy, tanging ang span ng tindig at ang punto ng pagkilos ng puwersa sa baras ay dapat matukoy sa pamamagitan ng pagguhit. Samakatuwid, ang sumusunod na pagpili ng tindig ay maaaring gawin.
1, Ang mga karaniwang bearings ay spherical roller bearings, single-row, double-row tapered roller bearings, double-row cylindrical roller bearings, four-point contact ball bearings, ball bearings, atbp.
2, tindig na mga pagtutukoy para sa paunang pagpili ay upang matukoy ang baras diameter tindig bore laki, input baras bilis ay mas mataas, ay dapat na napili na may parehong bore sa mas malaking pag-load ng mga pagtutukoy kapasidad, ang gitna baras ay may dalawang pares ng gear meshing puwersa na kumikilos sa tindig, sa linya na may mas malaki, dapat ding mapili na may parehong bore sa mas malaking mga pagtutukoy ng kapasidad ng pagkarga;
3, ang bilis ng output shaft ay mababa at isang pares lamang ng gear meshing force na kumikilos sa shaft at bearing, maaari mong piliin ang parehong bore sa load capacity ng medium o mas maliit na bearing, ngunit ang output shaft at ang machine spindle matibay na koneksyon at epekto, dapat itong piliin ang tindig na may mas malaking kapasidad ng pagkarga.

VIII. Ano ang magiging sanhi ng sirang baras sa gearbox ng isang gear motor?
Sa pang-araw-araw na trabaho, bilang karagdagan sa output ng reducer motor assembly concentricity ay hindi mabuti, at ang nagresultang reducer sirang baras, ang output baras ng reducer kung sira, hindi hihigit sa mga sumusunod na dahilan.
Una sa lahat, ang maling uri ng pagpili ay humahantong sa reducer na may hindi sapat na puwersa. Ang ilang mga gumagamit sa pagpili, nagkakamali naniniwala na hangga't ang napiling reducer's rated output metalikang kuwintas upang matugunan ang mga kinakailangan sa trabaho, sa katunayan, ito ay hindi, dahil ang rated output metalikang kuwintas ng motor multiply sa pagbabawas ratio, ang halaga ng sinturon sa prinsipyo ay mas mababa kaysa sa rated output torque ng mga katulad na reducer na ibinigay ng mga sample ng produkto.
Pangalawa, sa parehong oras upang isaalang-alang ang labis na kapasidad ng drive motor nito at ang aktwal na malaking gumaganang metalikang kuwintas na kinakailangan. Sa partikular, ang ilang mga okasyon ay dapat na mahigpit na sumunod sa patnubay na ito, na hindi lamang ang proteksyon ng mga gears sa loob ng reducer, ngunit higit sa lahat ang output shaft ng reducer ay napilipit.
Oras ng post: Nob-25-2022